Introduction
Visuals are used in subjects like
science, technology, engineering, and math (STEM). For example, chemistry
lessons on bonding typically includes the visuals
shown in Figure 1. While we usually assume that these
visuals help students learn because they make abstract concepts
clearer, they can also harm students’ learning
if students do not know how the visuals show information. To learn
from visuals, students need representational competencies —
knowledge about how visual representations show information. For example, a chemistry student
needs to learn that the dots in the Lewis structure (Figure 1a)
show electrons and that the spheres in the space-filling model
(Figure 1b) show areas where electrons may live.
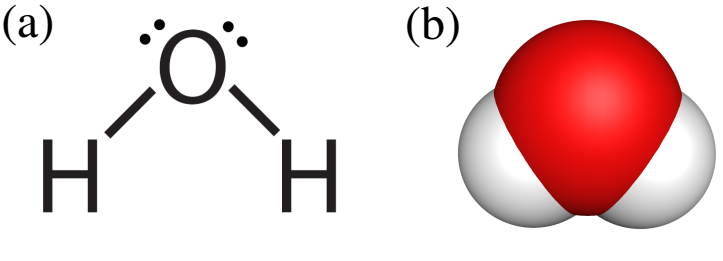
Figure 1: Two common visual representations of water (a: Lewis structure; b: space-filling model).
Lessons that help students learn representational
competencies mostly focuse on conceptual representational
competencies. These include the ability to connect visual features
to concepts, support conceptual reasoning with visuals,
and choose the right visuals to illustrate a given concept. Less
research has focused on a second type of representational
competency — perceptual fluency. This is the ability to
quickly and effortlessly see meaningful information in visuals.
For example, chemists can effortlessly see that both visuals
in Figure 1 show water. Perceptual fluency plays an important
role in students’ learning because it frees mental energy
for more complex reasoning. This allows
students to learn from visuals.
Students get perceptual fluency through learning processes that are
implicit and inductive. To understand this, think about the the way
you learned your first language. You didn't need to effortfully think
about the grammatical rules. Instead, you got a "feel" for the rules (implicit learning)
that came from many learning opportunities (inducing process).
Because of this, it is thought that perceptual fluency should be taught by
giving students many simple tasks in which they must quickly judge what
a visual shows. For example, a perceptual fluency task may ask students to quickly and
intuitively judge whether two visuals like the ones in Figure
1 show the same molecule. They ask students to rely
on implicit intuitions. The problem sequence is typically chosen
so that (1) students are exposed to a variety of visuals and
(2) consecutive visuals vary irrelevant features while drawing
attention to relevant features.
However, these general guidelines
leave many possible sequences open. So far, we do not have
a principle-based way of identifying the best problem sequences.
In our study, we used a created a computer model of how undergraduates
learn to solve perceptual fluency problems in chemistry. Then, we had a
computer algorithm teach the first model. Finally, we took the problem sequence
that worked best for the model and gave it to real humans on the Internet.
We found that the sequence of chemistry visuals (practice problems) created
by the machine was better for learning than a random problem sequence and a
sequence generated by a human expert who knew about chemistry and perceptual learning.
Perceptual Fluency
Representations used when teaching are defined
as external representations because they are external or outside of the
viewer. By contrast, internal representations are mental objects
that students can imagine and mentally manipulate. External
representations can be symbolic like the text in a book or visual like Lewis
structures in chemistry.
Perceptual fluency research is based on findings that
experts like doctors and pilots can automatically see meaningful connections among
representations, that it takes them little cognitive effort to
translate among representations, and that they can quickly
and effortlessly mix information distributed across representations. For example,
chemists can see at a glance that the Lewis structure in Figure 1A shows the same
molecule as the space-filling model in Figure 1B. This kind of perceptual
expertise frees up cognitive resources for more complex reasoning.
According to two learning theories, perceptual fluency involves building
accurate internal representations of visuals and connecting them
to each other.
Cognitive science suggests that students get perceptual fluency by perceptual induction
processes. Here, inductive means that students can figure out how visual properties relate to concepts
through practice. Students become better at seeing meaning in visuals
by treating each visual feature property as one perceptual chunk that relates to multiple concepts (perceptual chunking).
Perceptual induction processes are thought to be nonverbal happen unconsciously.
Lessons that target perceptual fluency are fairly
new. Some researchers have created math and science lessons
in which students translate between different visuals quickly. In our chemistry
study, students judged whether two visuals like the ones shown in Figure 1 show the
same molecule. Students would get dozens of problems like these in a row.
These interventions can raise test scores even if the problems are a bit different
from the problems used during the lesson.
Perceptual learning depends on the practice sequence. To design good sequences,
tasks should give students a variety of problems so that irrelevant features
vary but relevant features are constant across several tasks. But we know that
visuals differ from each other in many ways. So there are many possible sequences
that could vary visual features. To address this
problem, we used a new computer science approach called maching teaching.
Machine Teaching Procedure
Machine teaching is a computer science technique in which a computer
algorithm helps improve human learning. We took the following steps:
-
In a learning experiment, we ran an experiment to figure out how real human students relate
different visuals like the two molecules above (Figure 1).
-
From that data, we created a cognitive model
of chemistry visual learning. This model was a step-by-step problem-solving procedure
called an algorithm.
-
We used an algorithm to find an optimal machine-generated problem sequence.
- The machine-generated sequence was used to teach the cognitive model and predict
learning.
-
On the Internet, we tested all three sequences (machine, human expert, random) with
actual humans.
Which problem sequence is best for learning? We wondered
whether an algorithm run by a machine could improve learning beyond
a random problem sequence and a sequence created by a human expert.
Step 1: How do Humans Learn to Map Visuals?
First, we needed to train a learning algorithm that behaved like real humans
on perceptual learning lessons. To do that, we ran a small experiment.
We compared the learning algorithm’s
predictions to humans' test scores. In our pilot experiment, we recruited
47 undergraduate chemistry students. They were randomly
assigned to two conditions using random problem sequences --
training with feedback or training without feedback.
Perceptual fluency problems ask students
to make simple perceptual judgments. In our case, students
were given two images. One image was of a molecule represented
by a Lewis structure and the other image was a molecule represented
by a space-filling model. Students judged
whether or not the two images show the same molecule.
Step 2: Cognitive Model of Human Learning
Now, we describe how we created the cognitive model of how humans learn
with chemistry visuals. To do this, we describe the:
-
perceptual fluency tasks and how we represent them precisely
-
learning algorithm used by the cognitive model of human learning
A - Describing Molecules to Computers
In our experiment, we used visual representations of chemical
molecules common in undergraduate classes. To find
these molecules, we reviewed textbooks and web-based
content. We listed the frequency of different
molecules using their chemical names (e.g., H2O) and chose
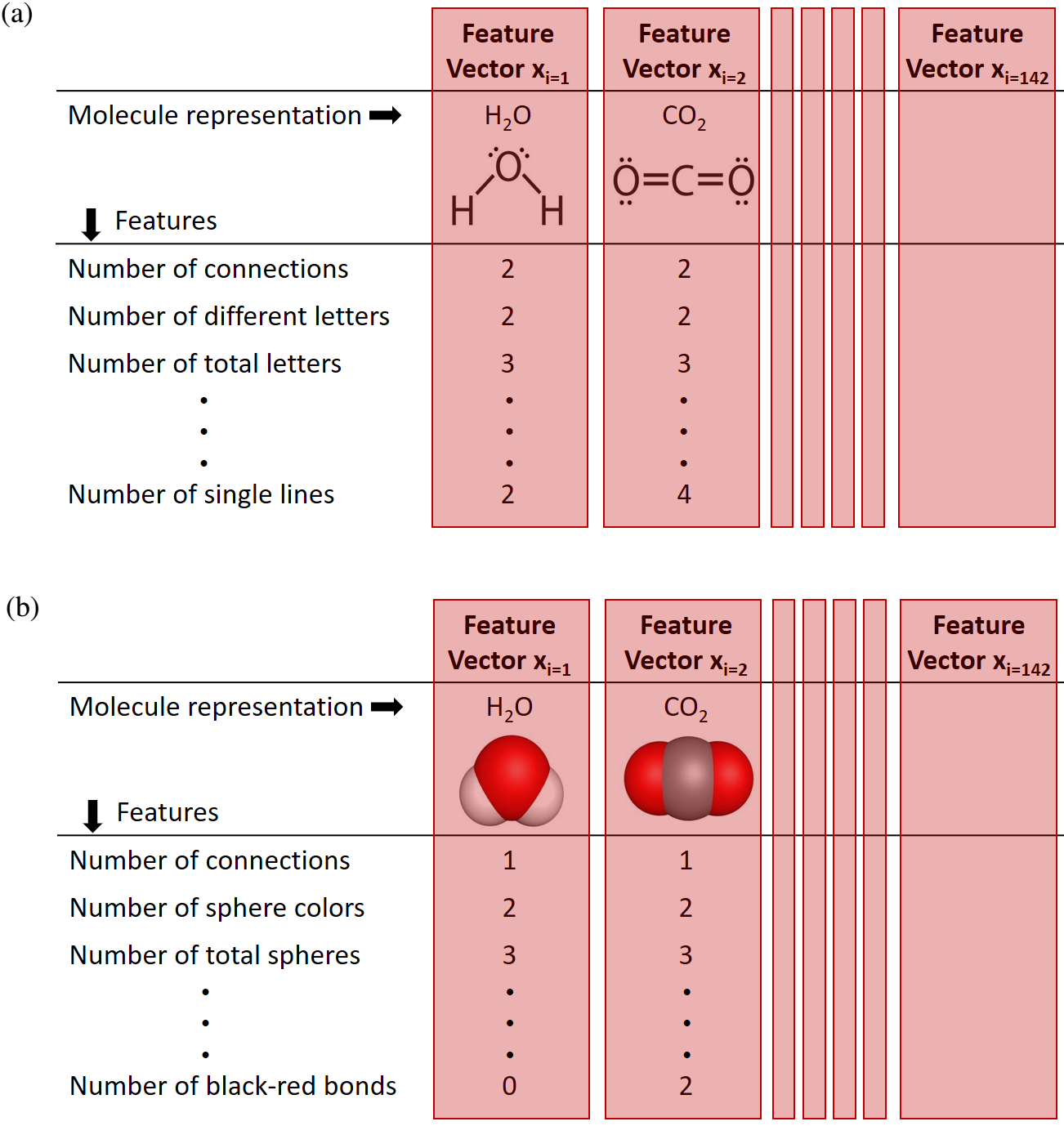
the 142 most common molecules. To precisely describe the
visual representations, we counted visual features like
the number of lines or dots in the Lewis structure and the
colors of spheres in the space-filling models. This allowed us to
create lists of visual properties called feature vectors.
Each molecule had a feature vector that described its visual features
Feature vectors of Lewis structures had 27 features. Feature vectors of
space-filling models had 24 features. These feature vectors were used by
the learning algorithm.
B - A Learning Algorithm Behaving Like Humans
Our learning algorithm plugged in the two molecules
(Lewis structure and space-filling model) as inputs in the form of
feature vectors. It was important to represent the molecules as feature vectors
because this translates the visual information to a "language" that software can
understand.
Given these feature vectors as inputs, the learning algorithm was able to place them in the same "world". This world is the golden vector space.
It can be thought of as a coordinate plane similar to the one in which you would place the points (0,4) and (9,3). Just as the distance between two
points in a coordinate plane can be calculated using the distance formula, the distance between two molecules can also be calculated. The distance between
two molecules represents their similarity. Two similar molecules will be very close together in the golden vector space and two dissimilar molecules will be far apart.
Next, we calculate the probability that the two molecules were the same. When given the correct answer, the algorithm updated itself. Over many
opportunities, this allows the algorithm to learn.
Step 3: Find the Best Problem Sequence
Our first problem was to consider the length of the problem sequences. Should we
create sequences of 50 problems? Or 100? Searching over all possible sequences
would be too complex for most computers. We settled on 60 as the length of the
problem sequence because this was closest to other studies.
Finding the best problem sequence was a computationally tough problem. For each problem
in the 60-problem sequence, there could be 5,041 possible options. This means that there were
504160 or 1.4 * 10222 possible sequences. We can not hope to find
the "best" or optimal sequence. So we settle for a sup-optimal or "good enough" sequence.
The algorithm that searchs for a suboptimal solution is called a modified hill climbining algorithm.
We consider a landscape with different training sets scattered about. We begin by looking at a random random
set and checking its neighbors. If the neighboring problem sequences result in better learning for the cognitive
model, we move to the better training set.
Step 4: Teaching the Best Problem Sequence to the Cognitive Model
We continued this process until no better neighbors are found. Because
of computer limits, we only checked 500 neighbors of a particular training set. The problem sequence
that remained was our solution -- the machine-generated problem sequence.
Step 5: Testing All Three Sequences in a Human Internet Experiment
To find out whether the machine problem sequence is best for learning,
we ran a randomized experiment with humans on the Internet.
Participants
We recruited 368 participants using Amazon’s Mechanical
Turk (MTurk). Of these, 216 were male and 131 were female. The rest
did not report their sex. Most participants (86%) were below
the age of 45.
Experimental Design
We compared three training conditions. In the machine training
sequence condition, we used the problem sequence found
by the search algorithm.
Participants judged whether the two
molecules were the same and received feedback. In the condition using
the human expert sequence, the training set was constructed by an expert in
perceptual learning and chemistry.
In the random training sequence condition,
each problem was randomly created.
Procedure
We hosted the experiment online. Participants first received a brief
description of the study and then completed a sequence of
126 judgment problems (yes or no). Tasks were divided into
three phases. Phase one was the pretest and it included 20
test problems without feedback. Phase two was for training and
it included 60 training problems with correctness feedback. We
assumed that participants learned during this phase. Phase
three was the posttest with 40 test problems displayed without
feedback.
In addition, one guard task was inserted after every 19
tasks throughout all three phases. A guard question either
showed two perfectly identical molecules shown by the same representation
or two highly dissimilar molecules shown by
Lewis structures. We used these easy guard questions to filter
out participants who randomly clicked through the tasks.
We ignored the guard tasks during modeling. When the
images of the two molecules were shown to participants, the
position (left or right) was randomized so that no representation
was on one side more often.
Results
Of the 368 participants, we filtered out 43 participants who
failed any of the guard questions. The final sample size was
325. The final number of participants in the conditions
random, human, and machine training sequence were 108,
117 and 100 respectively.
Conclusion
Our goal was to determine whether machine learning can
help find a sequence of visual representations that raises
students’ learning from perceptual-fluency tasks. To
do this, we used machine teaching to reverse-engineer an
optimal training sequence for a machine-learning algorithm.
Next, we conducted an experiment with humans that compared
the machine teaching sequence to a random sequence
and to a sequence generated by a human expert on perceptual
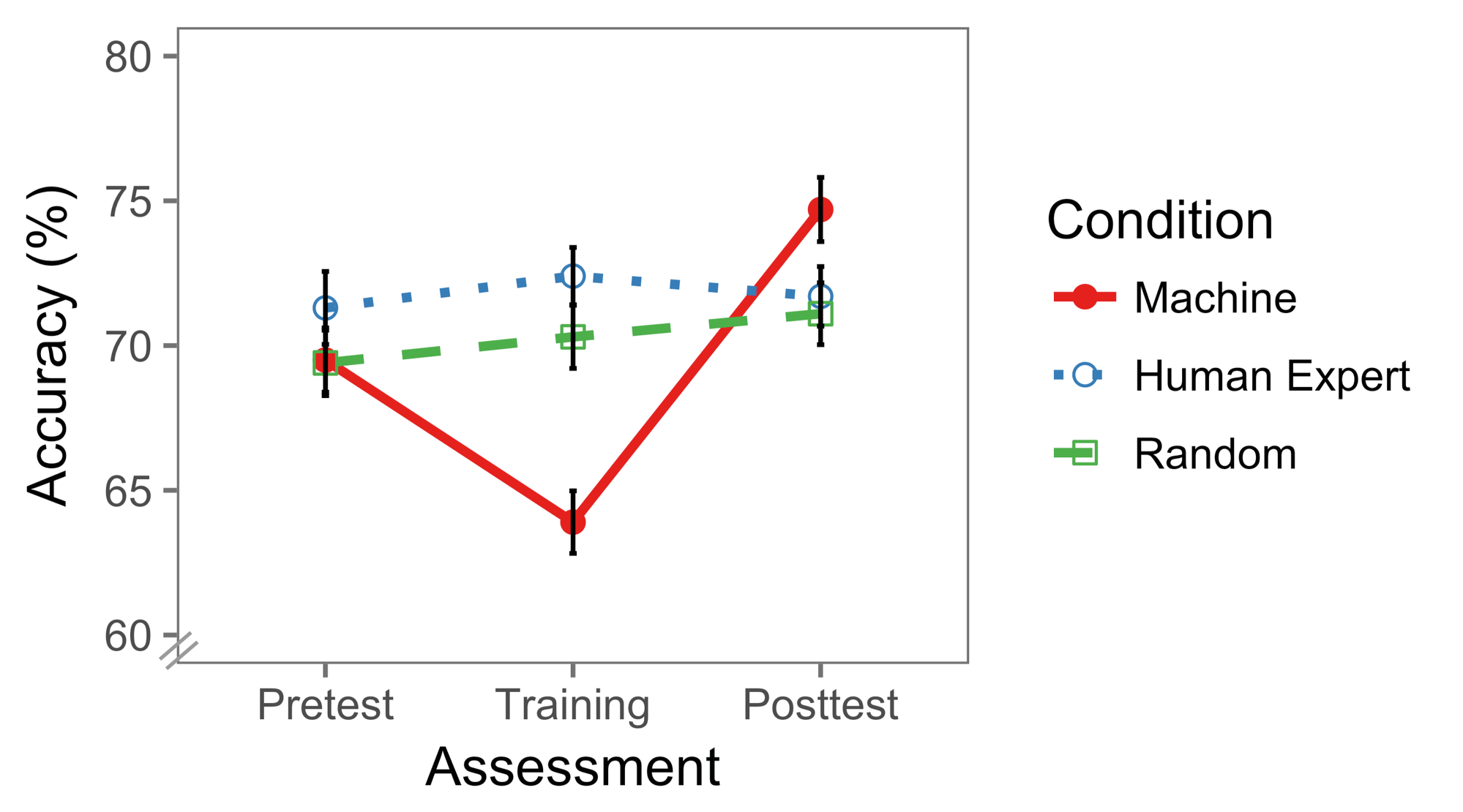
learning. The machine teaching sequence resulted in lower
training performance, but higher posttest scores. The fact that the machine learning sequence
yielded lower performance during training, but higher
posttest scores suggests that this sequence induced desirable
difficulties. Desirable difficulties refers to interventions yielding lower
performance during training, but higher long-term learning. Given that
visual representations are so common, we think that our findings will be broadly useful.